位相進み補償器を用いて制御系を設計してみた
以下の図に示す制御系において、直列補償として位相進み補償を用いて制御系の設計を行った
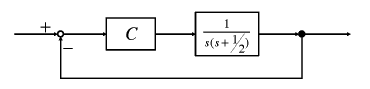
この制御系が以下の仕様を満たすように制御系の設計を行う。
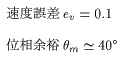
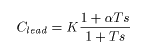
コントローラは以下の進み補償要素のみを用いる。
まず、ざっくりとおおまかな概念や理論についてまとめる。
位相進み補償とは
制御対象に対してあるブロック(補償器)を付加し制御対象の振る舞い(過渡特性)を改善するときに用いられる位相進み補償の全体的な位置づけ
まず、制御系の特性改善に用いられる補償要素には、制御対象に対して直列に挿入する直列補償と、フィードバック経路に挿入するフィードバック補償がある。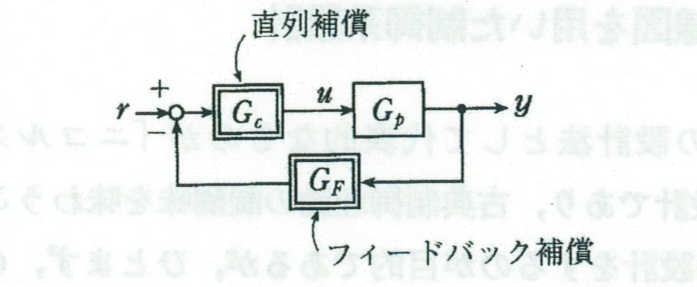
そのうち、位相進み補償とは、直列補償に分類され、直列補償には進み補償と後れ補償がある。
その進み補償である。
位相進み補償の特性
位相進みの主な特性は、共振周波数近くの位相が増加することにより位相余裕が増えることで、安定度が改善される以下に示す図には遅れ補償と進み補償の効果である。
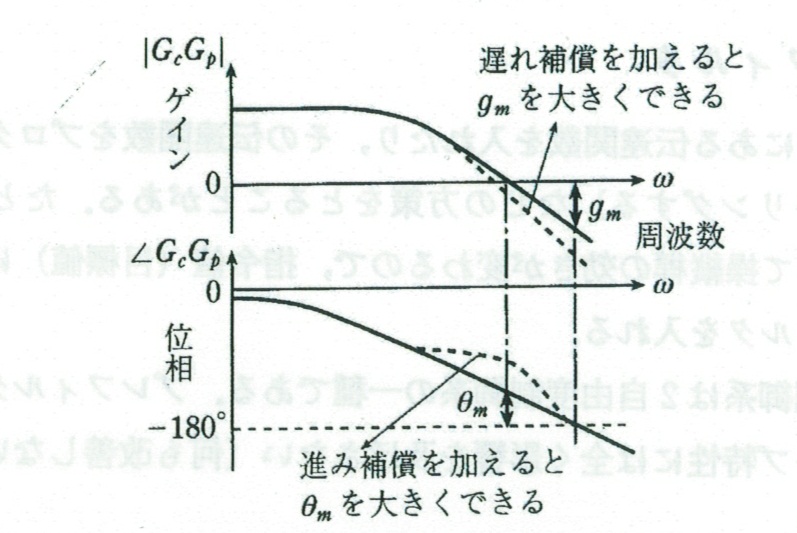
また、遅れ補償の場合、ゲイン余裕を増加させる事が出来る。
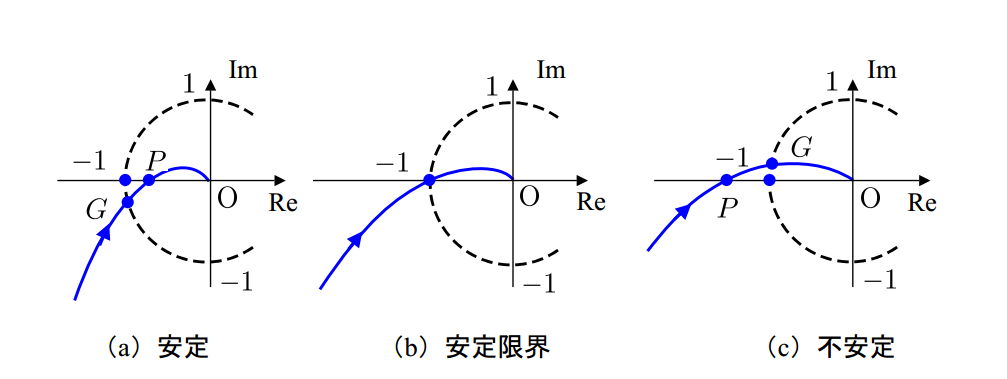
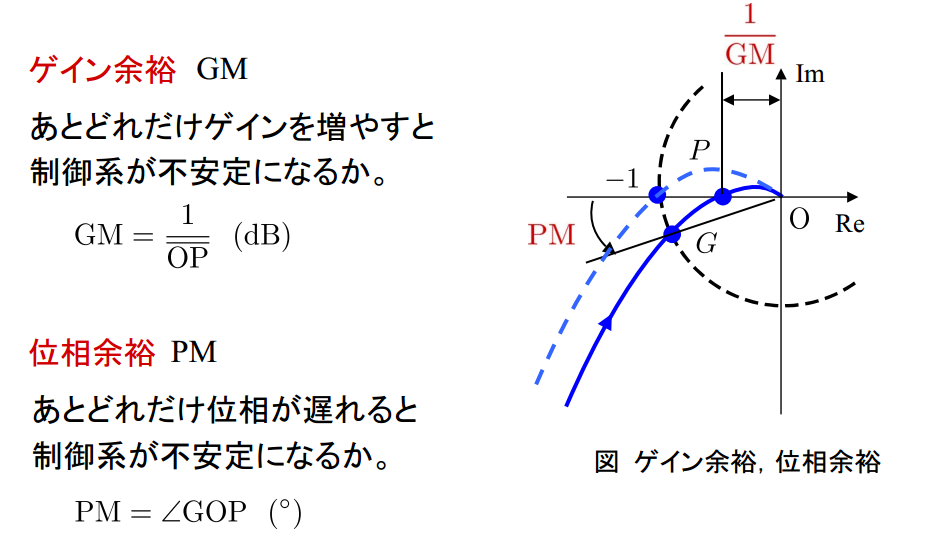
位相余裕、ゲイン余裕とは
ゲイン余裕や位相余裕について理解する事で安定性の程度を評価できる。
位相進み補償における設計手順
| step1. 性能仕様に対する仕様が満たされるように, ゲイン kの値を決める. |
| step2. kを用いて一巡伝達関数 のボード線図を描き, その位相余裕を評価する. kp(s)の位相余裕と目標位相余裕を比較し 必要な位相進め角φを決定する |
| step3. sinφ = (α-1)/(α+1)から, パラメータαの値を決める |
| step4. 位相進み補償では最も位相が進む角周波数で, ゲインが 10logα[dB]倍上がる。 そこで,位相進み補償後の新たなゲイン交差周波数をωmとおく。ωm = 1/(T√α)から, パラメータ T の値を決める |
| step5. 設計パラメータK,α,Tが定められたので,位相進み補償器を構成する |
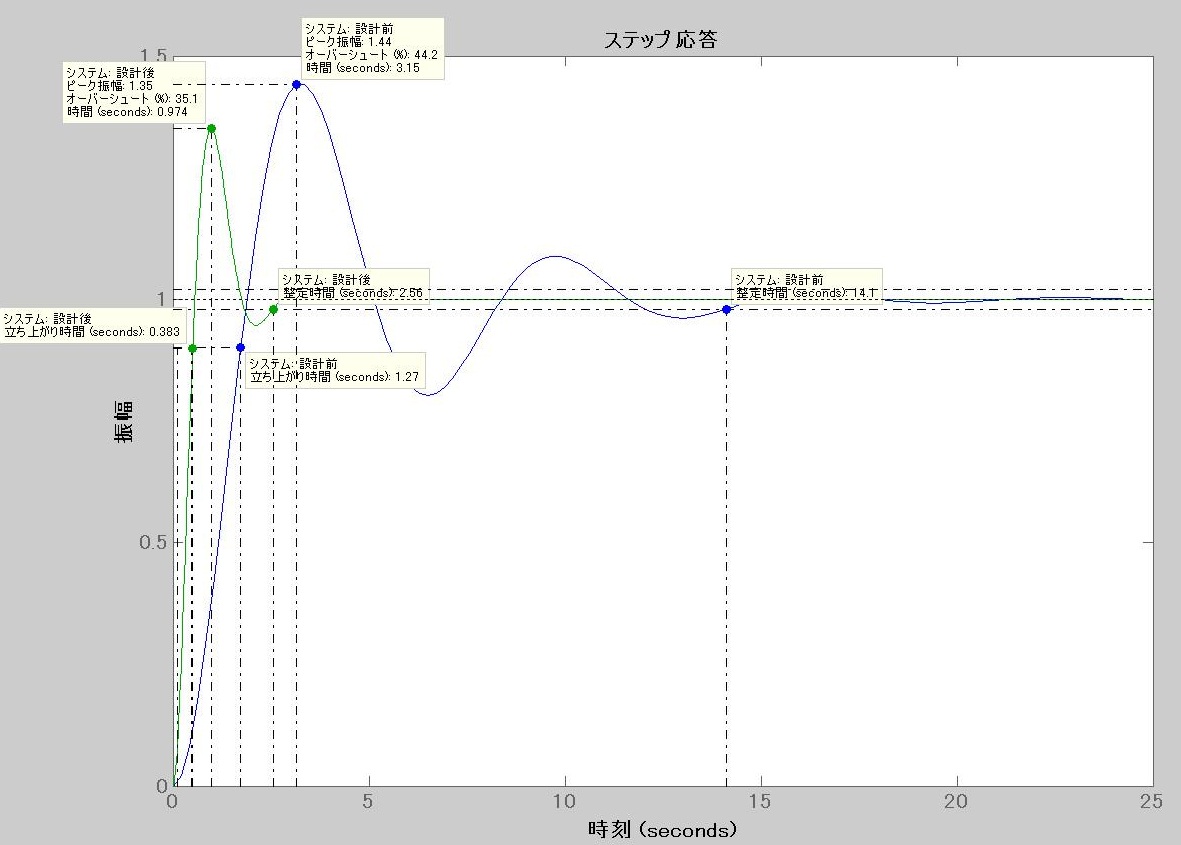
設計前と設計後の制御系の比較
ステップ応答を用いてコントローラーの有無による制御系の性能比較を行った。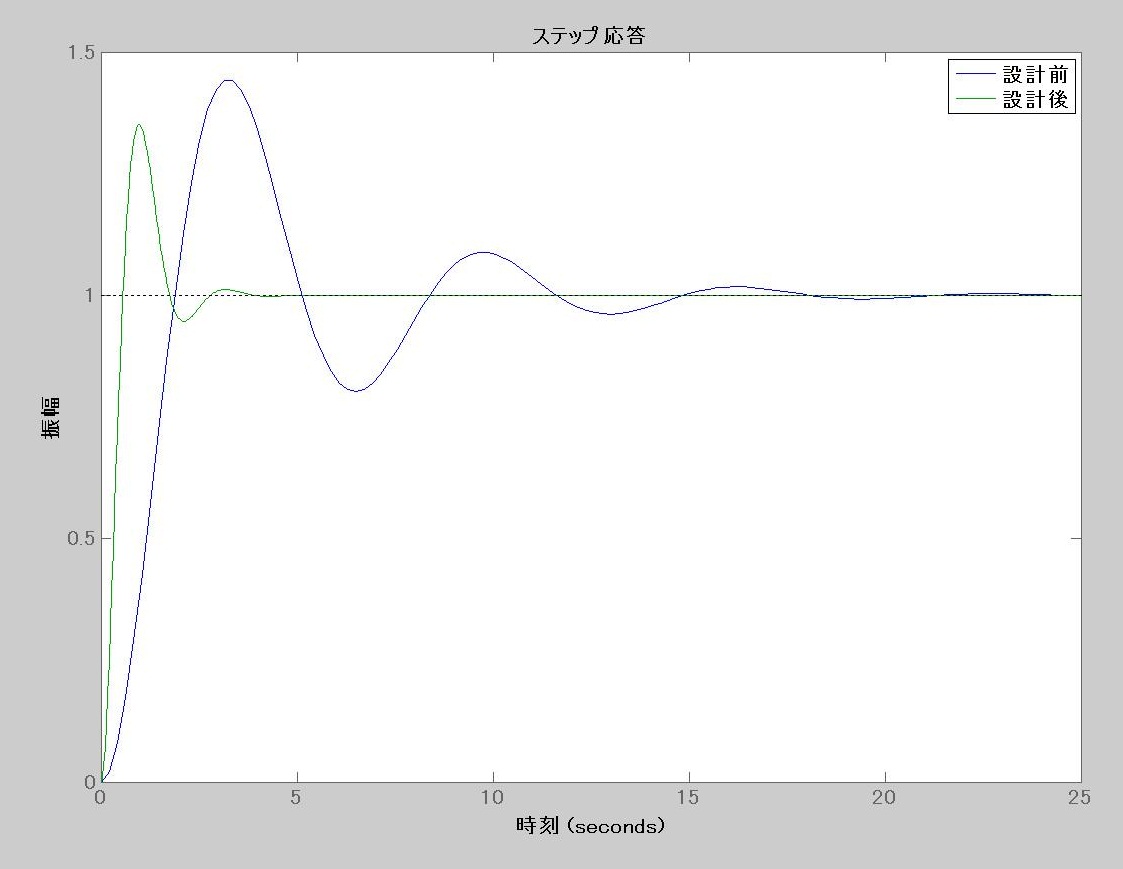
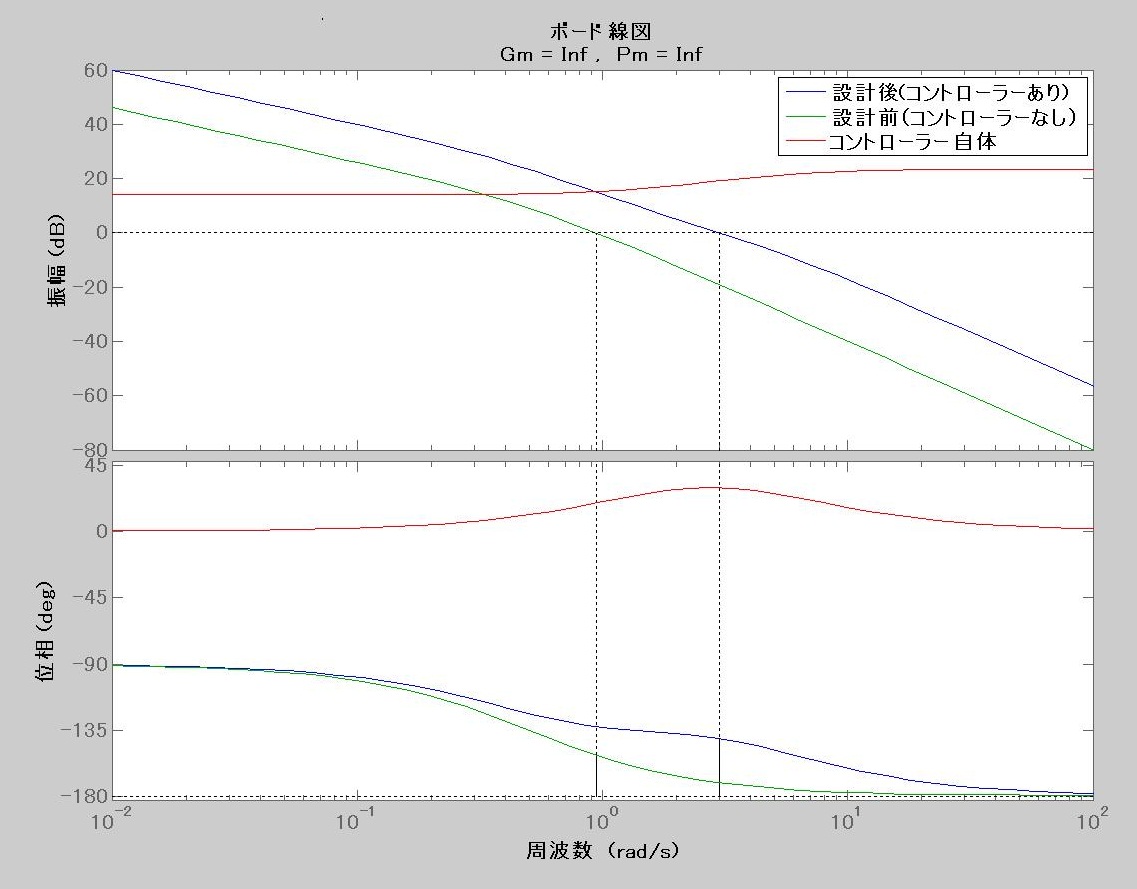
ボーデ特性の確認
設計したコントローラーを用いて制御対象のボーデ特性、コントローラーのボーデ特性、制御系全体のボーデ特性を確認した。下の図から、位相余裕が40度程度に出来たことが確認できる。