2リンクマニピュレーターを動かしてみた
今回動かした2リンクマニピュレーターはこれ↓
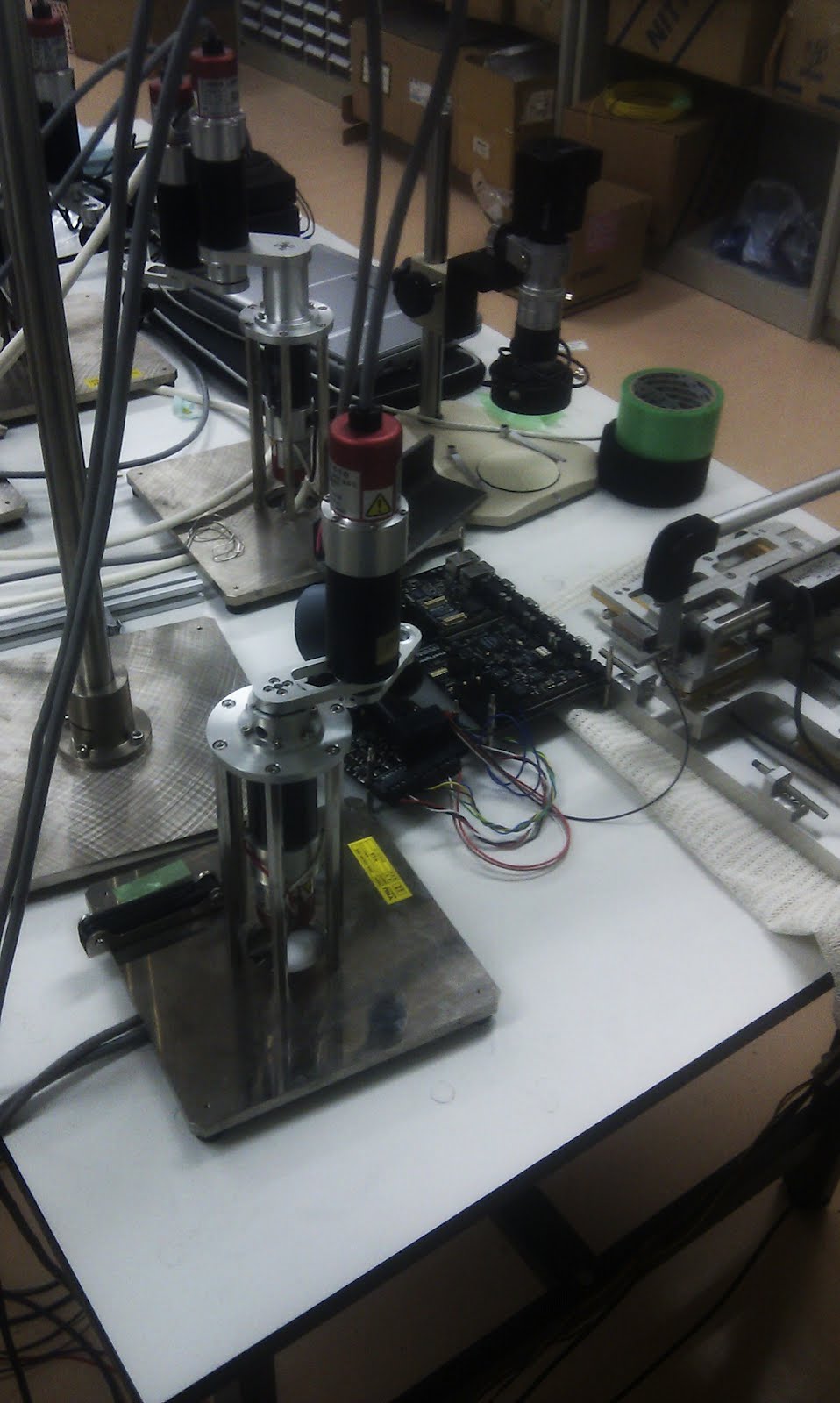
マニピュレータの関節の回転角はモータに取り付けられたエンコーダにより検出し, モータドライバ内部で速度フィードバックに利用されるとともに, カウンタボードを経由して PC に入力される.
PC は, それぞれのエンコーダからの信号より腕の軌道を計算し, D/A 変換ボードを通し, モータドライバに制御信号を出力する.
結果はこんな感じ。
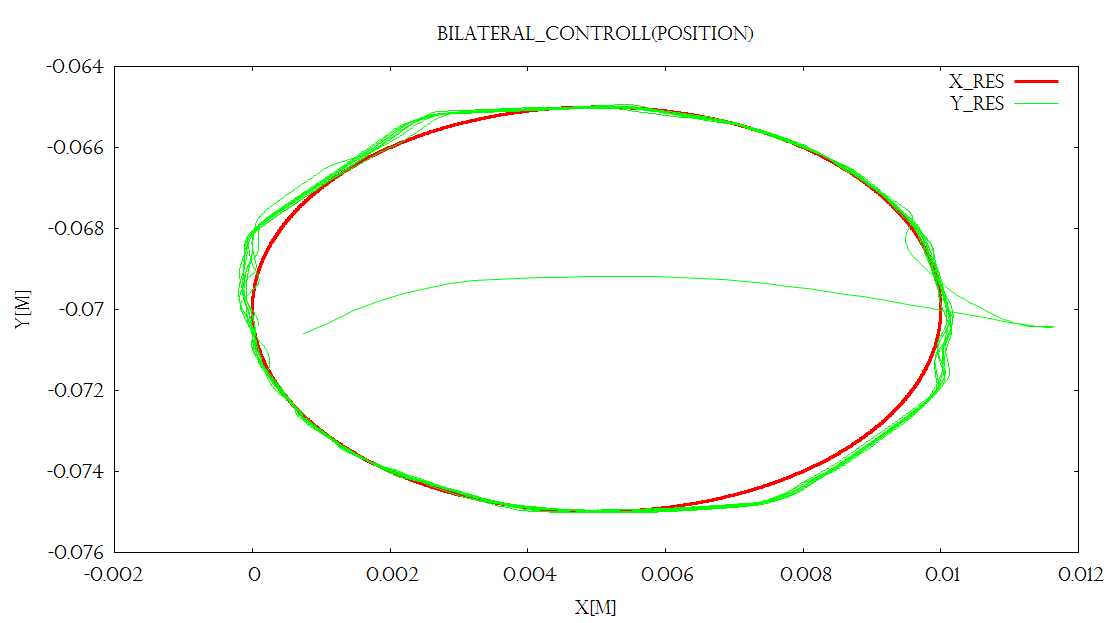
円軌道を描く前に線が入ってるけど、これは初期位置からの軌道。
指令値と応答値がかなりずれてるけど、これはマニピュレーターがケーブルに引っ張られて慣性が変動してしまうから。
また姿勢の変動により慣性行列の値が変動するため。